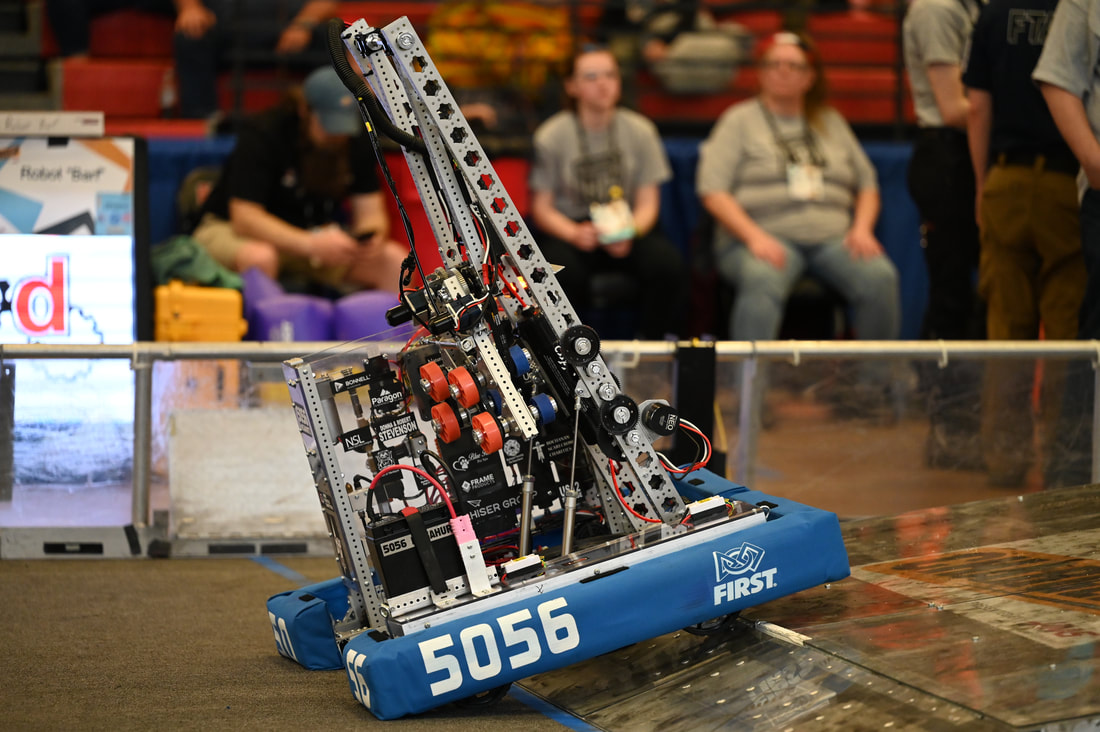
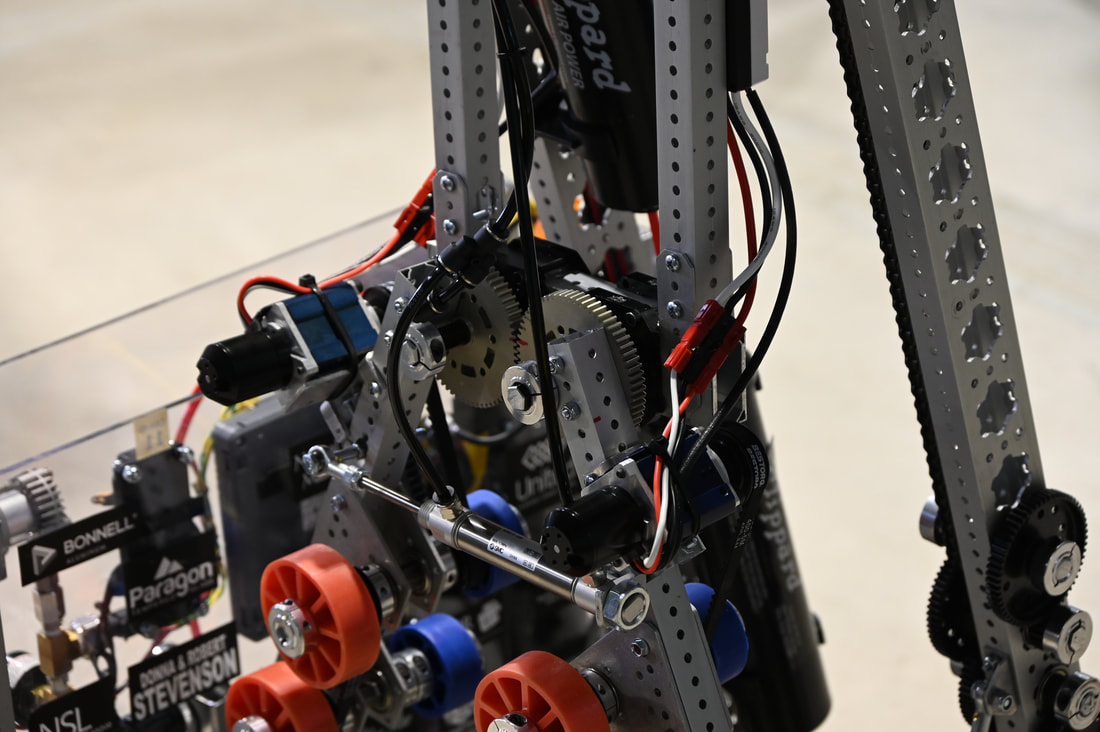
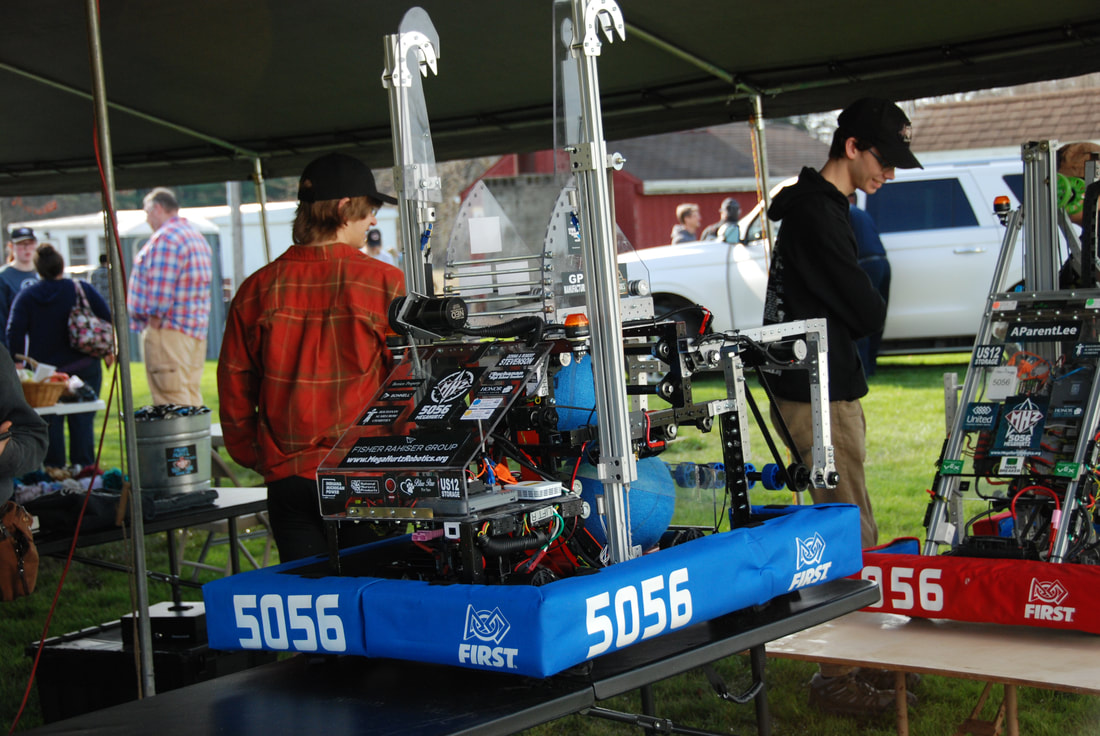
 MegaHurtz Robotics at the Sweet Shop (Cafe Italiano) in Buchanan on the way home from the St. Joseph District event, March 9, 2024. No one could have made me believe we were going to be finalists after the rough start we had in day one of our two day competition. In our very first match, we lost, and it was clear there was something not quite right with bot. It wasn't the great beginning we had hoped for, but the best comeback stories always start that way! There are many challenges to being a FIRST Robotics Team, but that’s sort of the point. Challenge the students, teach them critical thinking skills, engineering principles, and teamwork, and expose them to enough STEAM to keep them engaged and looking forward to their futures in these exciting fields. But, as a very small and fully self funded team, the challenges are exponentially greater. We often don’t get the latest technology. We can’t afford the best equipment and we can’t travel to extra events. We have been very blessed with the support our community has given us through their sponsorships and encouragement. Because of a huge investment in our program by the Fisher Rahiser Group and through our partnership with Lake Michigan STEAMWORKS a couple years ago, we have our own workshop where we hold classes and build our robots. Unfortunately, we still need to raise $20,000 each year in order to build a robot and go to competitions. Each season, the team applies for as many grants as we are aware of. This season we were very fortunate to receive a grant from TC Energy specifically for expenses related to building the 2024 robot. This $6000 boost to our team allowed us to invest in Swerve Drive. (You can see a video of the REV Swerve Drive on Team 4481 demo here) This type of drive system has dominated FRC competitions for years, but at a price point of over $2400 just to get started, it has always been out of our reach. With the grant from TC Energy, we were finally able to level up our robot designs. Of course, nothing on the robot is as simple as installing a part. Swerve Drive requires a massive amount of programming, calibration, and testing. We are very fortunate to have a returning team member and FIRST Alumni, Jesse Layne, as our programming mentor. Working with the students, he developed the advanced LabView programming code that makes it possible for our bot to move in any direction while utilizing a Field Forward orientation. The St. Joseph District event was the very first time we’ve ever tested the swerve drive system in competition, which means it was also the first time we’ve had to maintain it during the rigors of each match. It turned out to be a much bigger challenge than we expected. Anyone that builds things will tell you that putting something together is NOT the same thing as repairing it. Especially when you just came off the field and only have 10 minutes before you have to go back out! Things quickly turn into a gamble of what “needs” to be done, how little can we get away with now, and what will definitely need to be fixed later.
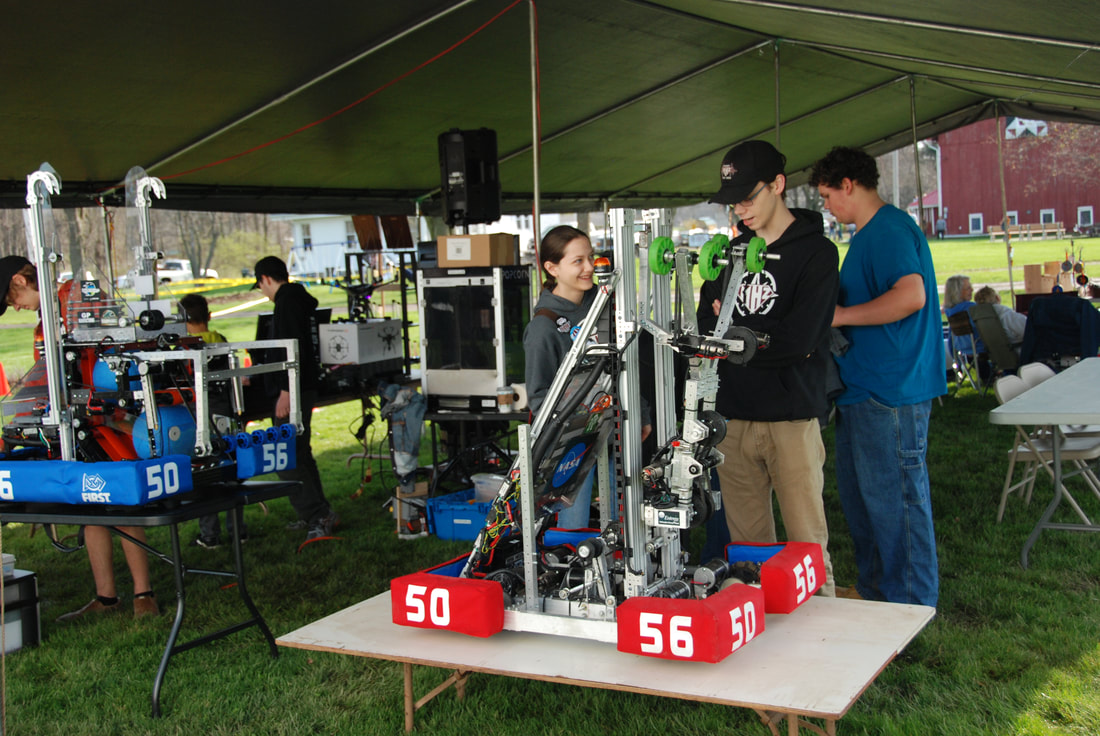
Day two: Saturday. The team arrived at 8:00 AM and only had an hour to work on the bot until opening ceremonies. The team didn’t feel they could get the part swapped out fast enough and the robot WAS working, so the decision was made to run it like it was. Somehow, our Driver and Operator duo of Logan Blumka and Jordan Layne managed to win the first couple matches even with our bot being slower and less capable. We were starting to look more like we should have at that point. We were shooting notes, dropping them in the Amp, and moving around the field much better, but still too slowly. At the conclusion of the Qualification matches going into the Alliance Selection, we were ranked 18th out of 38 teams. It was then that the #3 Alliance led by team 3452 The GreengineerZ from Berrien Springs and 4237 Team Lance-A-Bot from Lakeshore felt we had something to add going into the playoffs. To be honest, I don’t remember every detail of those couple hours. It was intense. We won Round One and Round Two. It looked like we were going to sweep the upper bracket, but then bot failures knocked us down to the lower bracket in Round 3. At one point, we had four teams in our pit helping us repair damage to the bot from gameplay. It all came down to match 13. If we won this one, we’d go to the finals. If we lost, it was an incredible run but we’d be done. Despite the setbacks and technical issues, Alliance #3 won match 13 and earned a spot in the finals. Alliance #1 vs. Alliance #3. I would love to say that the story gets better from here, but that was not how it went. Finals are best two out of three and while the first match was a close loss for us, the second match was a wash. We only had one working bot. Ours failed spectacularly on the field and one of our alliance partners lost the ability to shoot. Competition is hard on robots, but regardless of whose did what, we were an amazing team! We all went home with medals and the title of St. Joseph District Finalists.  By: Phillip Place
Lead Mentor: MegaHurtz Robotics FRC Team 5056
0 Comments
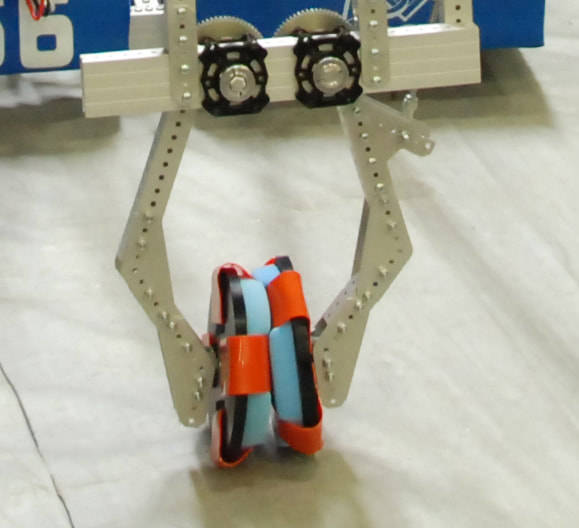
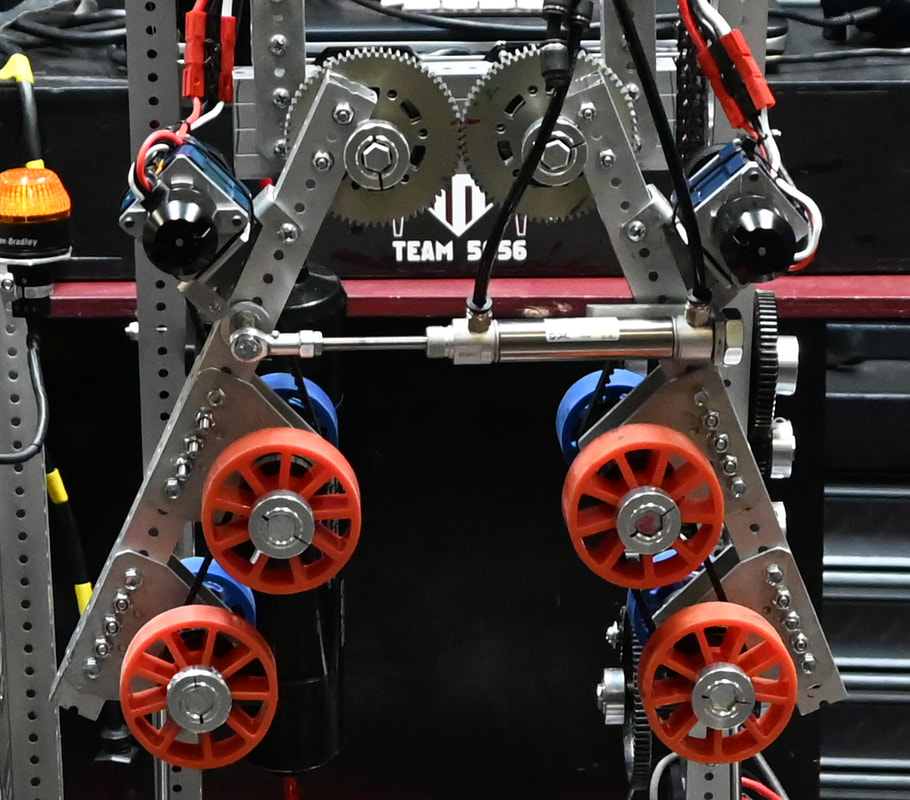
This season has been tough for us. Our team is made up primarily of seniors and 8th graders. What this has meant is that we have spent every meeting since September, teaching and mentoring the younger members so they were prepared for the 2024 season. This process meant building a robot. It wasn't a season bot or designed for any specific game. It was a simple frame with four drive motors that the student built completely on their own. Fast forward to January 2024 and the new FRC season. Crescendo isn't a complicated game, but like all FIRST seasons, there are parts to it that require a great deal of thought and work that may not have seemed that way when we first started. There are significant challenges to this type of game piece.
We were fortunate to be invited again this year to the Buchanan Community School Farm for Plow Day! We had the opportunity to meet the next generation of farmer and talk about why robotics is so important now and into the future. We also had a chance to take our drone out for the first time this year!
 MegaHurtz Robotics makes it to round 3 of the East Kentwood District Playoffs and brings home the Industrial Design Award! April 1, 2023So what is the Industrial Design Award? FIRST states that this award, “Celebrates the team that demonstrates industrial design principles, striking a balance between form, function, and aesthetics.” In order to be considered for this award:
The East Kentwood District event was an incredible experience for the entire team. In our first competition at the St. Joseph District event, we had a number of issues with our gripper that we simply could not have identified prior to competition. During that event, we focused our time less on competing and more on testing and redesigning. The field experience was the perfect opportunity to test some ideas and get a real feel for the bot and the game. Coming home with that knowledge and experience, the team quickly got to work redesigning everything but the drivetrain. The motor and gear system for our first stage arm was completely removed and replaced with pneumatic cylinders. The gripper was stripped down to its base components and a new motor driven intake system was installed.
 2023 St. Joseph District - Team Photo Ten students, eight weeks and a lot of pizza! That is what went into this season's Week 2 event at St. Joseph High School. Going into this event we were still two week behind schedule, so we knew we needed to have realistic expectations. We're not going to be the best bot. We're not going to have everything working. We're simply going to do the best we can with what we have. This "resignation" served as an empowerment and the team flourished. By the end of the event, our first-time driver handled the bat as if he'd been doing it for years. Team members each found solid footing in their new roles and everyone gave it their all. The best part: We all had a blast. It was a great weekend and now we're motivated more than ever to work the bugs out to be ready for Kentwood in Week Five! A Little HistoryThe 2023 season didn't start well. Each year the team works to secure the $20,000 needed for the season. Typically, we don't know if we'll have enough until November which is also the deadline to pay FIRST the $6000 they require for teams to participate. (Yes, we must pay to play) So, once we knew we had enough to register and continue with the season, we start the purchasing process for parts we're going to need to build a robot. It was an unexpected shock to learn that nearly everything we needed was out of stock. In fact, the building system that we've used for years was completely unavailable. In January of each year, teams from all over the world get together for the big Kickoff. This is the major event where the game is revealed and we all learn what the robot will have to do on the field. During our kickoff we spent a great deal of time brainstorming how we were going to accomplish a build and also WHERE we were going to purchase parts! After review several options, we decided to adopt the Rev Robotics building system. This required purchasing all new pieces and parts, adapter, brackets, etc.. On top of having to completely purchase and learn a new building system, we had to wait up to a week for the parts to arrive each time we ordered. Over the course of the build season, we spent three weeks just waiting on parts! MegaHurtz made it to the Quarter-Finals this past weekend, taking double elimination to three matches before being knocked out by the #2 alliance. We'd like to thank our alliance members teams 4855 and 4004 for an amazing run! Sadly, this ends our 2022 competition season but opens our schedules for our next phase in moving to our new workshop! Be sure to checkout all the photos and our season video (coming soon). Thank you to all our supports and team sponsors. None of this would have been possible without you!   MegaHurtz Robotics along with The #3 Alliance Captain Team 2054 (Tech Vikes) and Team 4237 (Lance-A-Bot) took home second place this weekend at the St. Joseph District Event at St. Joe High School. An incredible weekend and emotional roller coaster ended with MegaHurtz earning a spot as the St. Joseph District Finalist. Taking home 2nd place is the highest our team has ever achieved at this event. The St. Joseph District event is an extremely competitive event and a go-to destination for the top teams of the state. The popularity of this event is such that ESPN has featured the playoffs live for the last few years! Topping off an amazing achievement, MegaHurtz was also awarded the St. Joseph District Judge's Award. According to FIRST, "During the course of the competition, the judging panel may decide that a team's unique efforts, performance, or dynamics merit recognition, yet do not fit into any of the existing award categories." The judges named this year's Judge's Award the "Full STEAM Ahead Award". This family has their sights on the future of FIRST. From the unique design of their buttons and pancake breakfasts, they're going to STEAM the way from more FIRST teams. Contribution to the community never HURTZ.  This award was the judges unique way of highlighting the new relationship MegaHurtz has formed with Lake Michigan STEAMWORKS to be an educational non-profit bringing FIRST programs to grades K-12 through our community partnerships and our local fundraisers. Team members are interviewed by the judges for many difference aspects of the competition, robot, and community outreach. We are very proud the judges recognized our efforts and we also celebrate our team members for being able to communicate that to the judges in a way that made us standout as a leader among the many teams competing at the event.  Watch the St. Joseph District Playoffs on Twitch!If you've been following MegaHurtz Robotics, you know that we have received a tremendous amount of support from some very special sponsors. Two years ago, through their generosity, we began the plans for a new robotics workshop. The plan was to have it finished enough that we could be in it by the 2022 season. As with everything right now, the unpredictability of availability, resource constraints and a multitude of other factors, our new move-in date is late Spring 2022! In some ways this is a relief for the team. It would be impossible for us to both be working on a new facility and our new robot. With that being said, we have started changing the way we operate in the workshop. The new space will be nearly 100% modular. All our tables, benches and tool carts will be on wheels so we can easily move things around as the season progresses from Design to Build to Drive. A major upgrade for us in this new working model is our brand new, height adjustable table! We also have new mobile workbenches. In the two weeks since kickoff, we've noticed a huge difference in our productivity and effectiveness working on the bot and the subsystems.  New ChallengesWe are extremely excited to get a small glimpse into what working in the new workshop will be like next season. There is still so much work to be done on our new shop and we hope that anyone passionate about STEM (STEAM) would consider contributing to our GoFundMe that will help pay for the new equipment and tools we'll need.
More information is available here: https://gofund.me/7b7bd4e7 2022 SEASON OPEN HOUSECOME LEARN ABOUT THE TEAM, THE COMPETITION AND ROBOTSSATURDAY NOVEMBER 6 @ 3:00 PMThe Robotics Workshop is located in the old brick building off the Science Wing parking lot. TAKE YOUR TURN AT DRIVING THE ROBOTS
PRIZES - FOOD - ROBOTS ANY STUDENT IN GRADES 8 THROUGH 12 IS ELIGIBLE TO BE ON THE TEAM BUCHANAN RESIDENCY OR ENROLLMENT NOT REQUIRED |

MegaHurtz Team Blog
Archives
March 2024
Categories |

























 RSS Feed
RSS Feed

|
MegaHurtz Robotics | FIRST Team 5056
Buchanan High School, Buchanan Michigan |
Our financial partner is Lake Michigan STEAMWORKS
More information can be found at www.lakemichigansteamworks.org |