|
The Chassis is built. The drivetrain installed. We have a drivable robot and are well on our way with the ball gripper system. We have also redesigned the lift (elevator) system we used for last year's bot. The gripper/ball intake will mount to that so we can reach up the nearly 7' to the highest hatch.
0 Comments
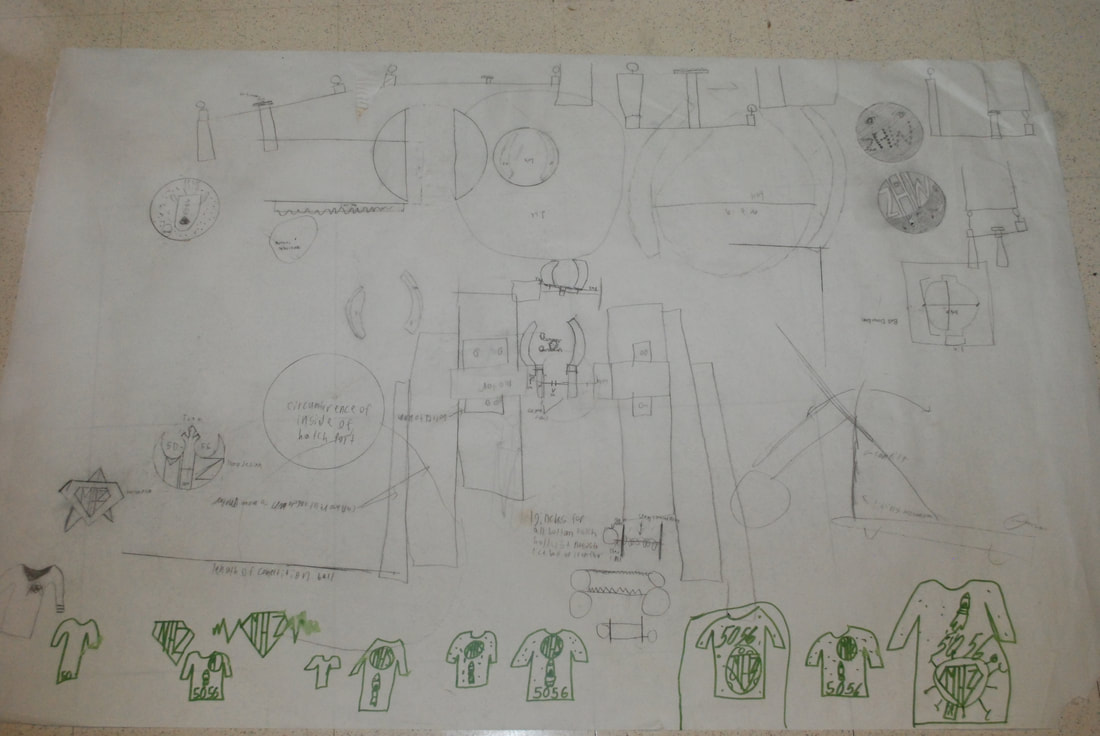
In the first week of robotics, we planned out ideas from the team and meshed them all together into one design. We ordered the needed parts from Vex and started working on a mock-up model of a gripper for this year. While we're designing the bot, a few others were getting ideas for the uniform designs for this year. -Brett |

MegaHurtz Team Blog
Archives
March 2024
Categories |







 RSS Feed
RSS Feed

|
MegaHurtz Robotics | FIRST Team 5056
Buchanan High School, Buchanan Michigan |
Our financial partner is Lake Michigan STEAMWORKS
More information can be found at www.lakemichigansteamworks.org |